핵심 요약
AWS가 NVIDIA Isaac를 활용한 시뮬레이션-현실 경로의 참조 아키텍처를 제시해, 프로덕션 레디 로봇 애플리케이션의 개발·배포를 가속합니다.
구현 방법
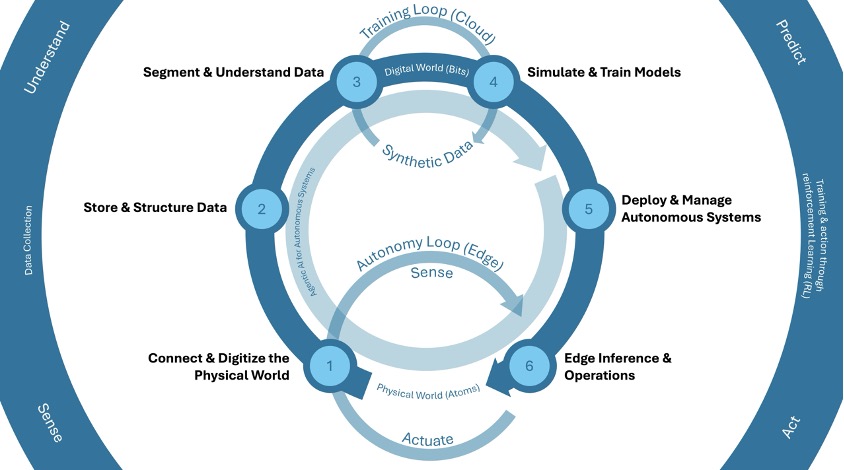
- 시뮬레이션 경로: Isaac Sim으로 디지털 트윈 생성, Isaac Lab으로 수천 개의 병렬 시나리오 학습. EC2 GPU 컨테이너 + AWS Batch로 확장 실행, 모델은 S3/ECR에 저장.
- 실제 학습 루프: Jetson Thor 엣지에 Greengrass로 배포, 센서 데이터는 MQTT→IoT Core/Firehose→S3, 영상은 Kinesis Video Streams로 처리합니다. SageMaker로 운영 데이터 재학습 및 재배포.
- 운영 개선: 드리프트 감지 시 자동 재학습 트리거, 데이터 수집-정제-재배포 사이클로 지속 개선합니다.
주요 결과
- 시뮬레이션 학습으로 초기 정책 개발 속도와 비용 효율성 향상, 시뮬레이션-현실 간극 관리 가능성을 제시합니다.
- UR 로봇 팔 사례처럼 실전 적용 가능성을 확인합니다.